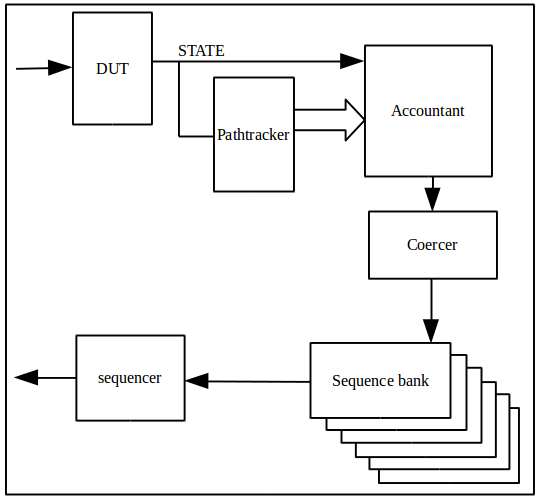
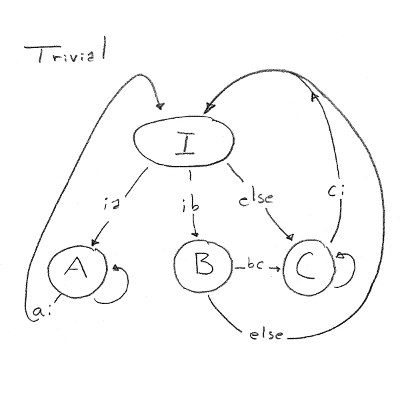
Consider the trivial state machine described and pictured to the right. The Verilog RTL produced by FSMgen.pl (below the bubble diagram) has STATE as a primary output. The path information produced by FSMgen.pl is as follows (from trivial_paths.txt):
BITS=2 CLK=clk RESET=reset STATE :: I : 00 STATE :: A : 01 STATE :: B : 10 STATE :: C : 11 path1:I(ia)A(ai)I path2:I(ib)B(ELSE)I path3:I(ELSE)C(ci)I path4:I(ia)A+(ai)I path5:I(ib)B(bc)C(ci)I path6:I(ELSE)C+(ci)I path7:I(ib)B(bc)C+(ci)I
Using trivial_paths.txt as an input, the script Pathmaker.pl produces one acceptor automata per path. Here is the acceptor automata for path7:
//Path path7 is I(ib)B(bc)C+(ci)I
module path7 (
input [1:0]STATE,
input clk,
input reset,
output [4:0]EXPECTING,
output ok2spin,
output doing,
output done) ;
logic [3:0] FSM ;
logic [3:0] nextstate ;
logic doing ;
logic done ;
localparam I = 2'b00 ;
localparam A = 2'b01 ;
localparam B = 2'b10 ;
localparam C = 2'b11 ;
localparam my_ZERO = 4'd0 ;
localparam my_I = 4'd1 ;
localparam my_B = 4'd2 ;
localparam my_C = 4'd4 ;
localparam my_DONE = 4'd8 ;
assign doing = |FSM ;
assign done = FSM[3] ;
always_comb
begin
if (STATE == I) EXPECTING = B ;
else if (STATE == B) EXPECTING = C ;
else if (STATE == C) EXPECTING = I ;
end
// Registered part of the FSM:
always @(posedge clk or posedge reset)
begin
if (reset) FSM <= my_ZERO ;
else FSM <= nextstate ;
end
// Combinatorial part of the FSM:
always_comb
begin
nextstate = 'bx ;
case (FSM)
my_ZERO : if (STATE == I) nextstate = my_I ;
else nextstate = my_ZERO ;
my_I : if (STATE == B) nextstate = my_B ;
else if (STATE == I) nextstate = my_I ;
else nextstate = my_ZERO ;
my_B : if (STATE == C) nextstate = my_C ;
else nextstate = my_ZERO ;
my_C : if (STATE == I) nextstate = my_DONE ;
else nextstate = my_C ;
my_DONE : nextstate = my_DONE ;
endcase
end
//And a final output
assign ok2spin = (FSM == C) ;
endmodule

trivial.fsm NAME=trivial CLK = clk RESET = reset ENCODING = BINARY INITIALSTATE = I IDLESTATE = I I(ia)A I(ib)B I(ELSE)C A(ai)I B(bc)C B(ELSE)I C(ci)I bored <= I busy1 <= A busy2 <= C
module trivial (
input clk,
input reset,
input ia,
input ib,
input ai,
input bc,
input ci,
output bored,
output busy2,
output busy1,
output [1:0] STATE) ;
localparam I = 2'b00 ;
localparam A = 2'b01 ;
localparam B = 2'b10 ;
localparam C = 2'b11 ;
// State driven outputs:
assign bored = (STATE == I) ;
assign busy2 = (STATE == C) ;
assign busy1 = (STATE == A) ;
// Register part of the FSM
logic [1:0] STATE, nextstate ;
always @(posedge clk or posedge reset)
begin
if ( reset ) STATE <= I ;
else STATE <= nextstate ;
end
// Combinatorial part of the FSM:
always_comb
begin
nextstate = 'bx ;
case (STATE)
I : if (ia) nextstate = A ;
else if (ib) nextstate = B ;
else nextstate = C ;
A : if (ai) nextstate = I ;
else nextstate = A ;
B : if (bc) nextstate = C ;
else nextstate = I ;
C : if (ci) nextstate = I ;
else nextstate = C ;
endcase
end
endmodule